|
Hi! I am a final-year undergrad in Mechanics & Interdisciplinary Engineering at Tsinghua University. Currently, I am working on Humanoid Control with Shengbo Eben Li and Hang Zhao. CV | Google Scholar | Twitter | Youtube |

|
Research Interests
|
Awards & Honors
|
News
|
Publications
* denotes equal contribution
|
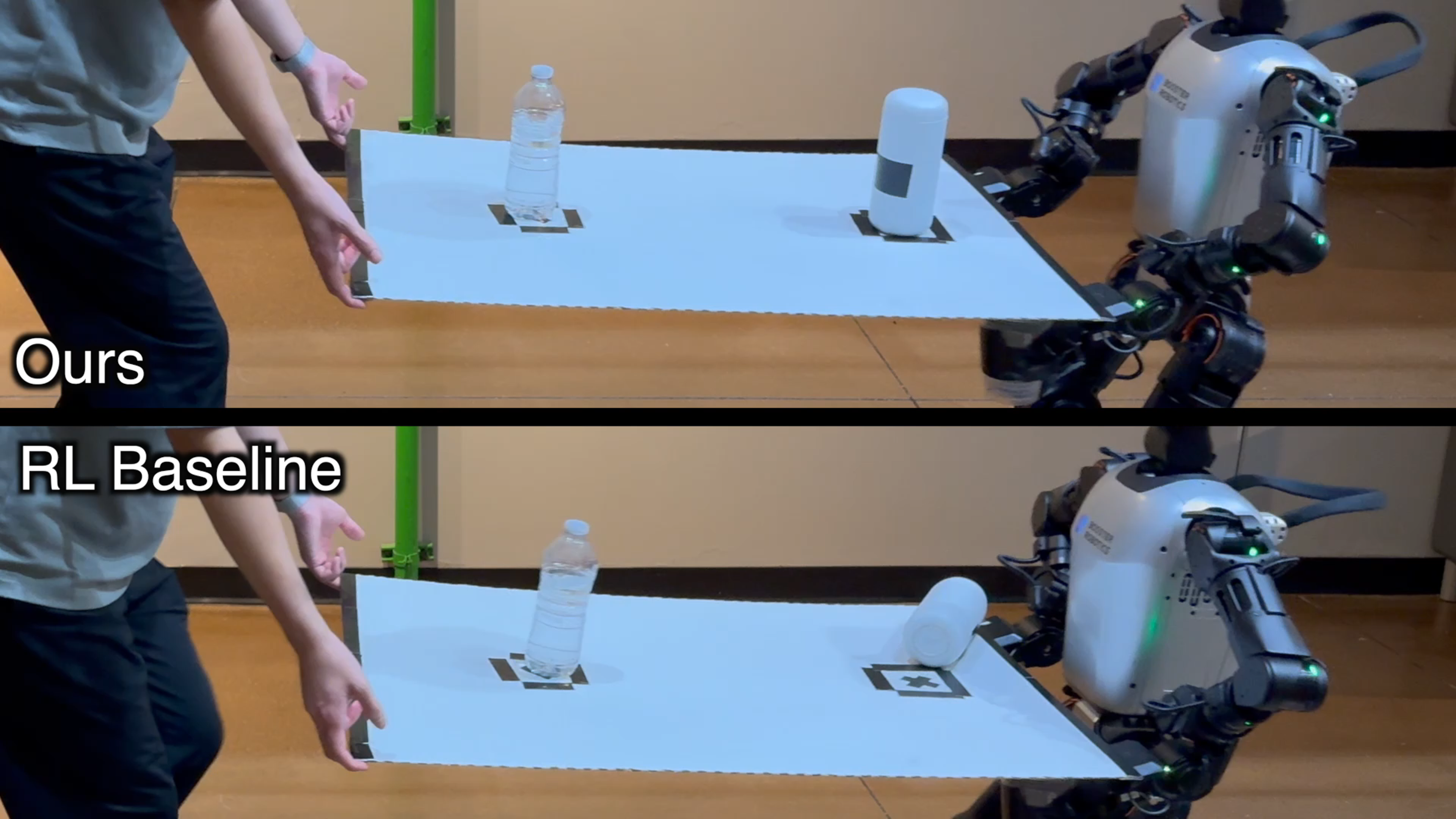
SEEC: Stable End-Effector Control with Model-Enhanced Residual Learning for Humanoid Loco-ManipulationJaehwi Jang*, Zhuoheng Wang*, Ziyi Zhou, Feiyang Wu, Ye Zhao Submitted to ICRA 2026 Page | arXiv | Video | BibTeX |

|
Dribble Master: Learning Agile Humanoid Dribbling Through Legged LocomotionZhuoheng Wang*, Jinyin Zhou*, Qi Wu Submitted to ICRA 2026 Page | arXiv | Video | BibTeX |
RoboCup Competitions

|
RoboCup 2024 Eindhoven Humanoid League KidSize Soccer CompetitionTeam Leader Top Eight |

|
RoboCup China 2024 Humanoid League KidSize Soccer CompetitionTeam Leader 1st Place |

|
RoboCup Asia-Pacific 2023 Humanoid League KidSize Soccer CompetitionTeam Member 4th Place |

|
RoboCup China 2023 Humanoid League KidSize Soccer CompetitionTeam Member 2nd Place |
Experience

|
Georgia Institute of Technology06/2025 - 09/2025 Research Intern Advisor: Prof. Ye Zhao and Prof. Anqi Wu |
|
Booster Robotics11/2024 - 04/2025 Research Intern |

|
Tsinghua University08/2022 - Present Bachelor in Mechanics & Interdisciplinary Engineering GPA: 3.9/4.0 |
Misc
I love playing soccer in my free time! I am honored to be recognized as a National Second-Level Athelete in Soccer. |